
Une interaction cyclique de robots
CONSTRUCTION, DECONSTRUCTION.
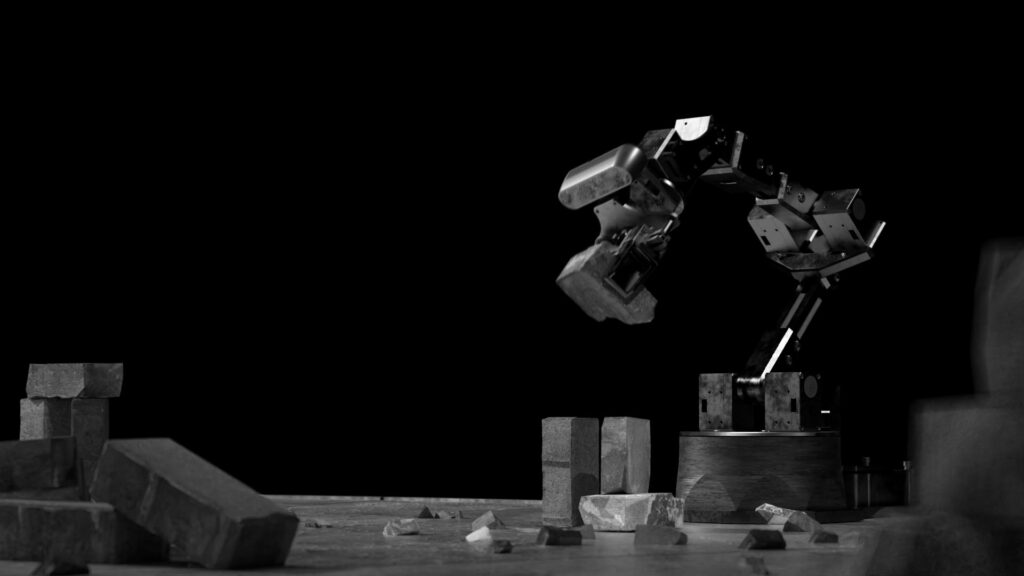
Créée par Kachi Chan (IALab), « Sisyphus » est une installation mettant en scène des robots engagés dans une interaction cyclique sans fin. Les petits robots construisent des arches en briques, tandis qu’un robot géant les éboule. Voici un récit de construction et de déconstruction.

L’œuvre tire son nom d’un personnage de la mythologie grecque, Sisyphe, condamné à pousser chaque jour un rocher en haut d’une colline pour le voir ensuite redescendre.
Sisyphus est un commentaire sur le climat socio-politique actuel, où les systèmes d’autorité et de résistance s’affrontent continuellement. La répétition est explorée dans cette pièce à travers l’interaction de deux systèmes robotiques contrastés ; l’un petit et agile, l’autre puissant et oppressant – le Sisyphe grec représentant l’un ou l’autre ou les deux.
« Malgré l’écart qui existe entre la taille des deux robots, leur lutte est sans fin. Le robot géant ne fait aucune concession et continue à écraser les arcs de briques. Cependant, même une fois détruits, les petits robots continuent à construire de nouveaux arcs en briques, manifestant ainsi une résistance collective par des actions individuelles autonomes. Ici, le statu quo est continuellement remis en question par de petits actes dispersés qui perturbent le pouvoir absolu du robot géant. La persistance des petits robots et leur capacité à propager de nouvelles formes de résistance à petite échelle rendent tous les efforts valables, par opposition à « futiles ». Ainsi, Sisyphe symbolise non seulement la confrontation entre le pouvoir et la résistance, mais aussi l’espoir qui accompagne la possibilité de changement.«
L’installation utilise le système ROS (Robot Operating System), la vision par ordinateur, pour faire fonctionner le petit robot – la caméra cherche une surface rectangulaire (la surface de la brique tournée vers le haut), puis elle utilise la trigonométrie pour calculer la distance et l’angle par rapport à elle-même (le petit robot), puis elle effectue le ramassage – Fusion 360. Le petit robot est fabriqué à partir de servomoteurs Dynamixel (XM 430 et XL430), du bras robotique PincherX150 et d’impressions 3D personnalisées. Le grand robot est un Kuka KR60.